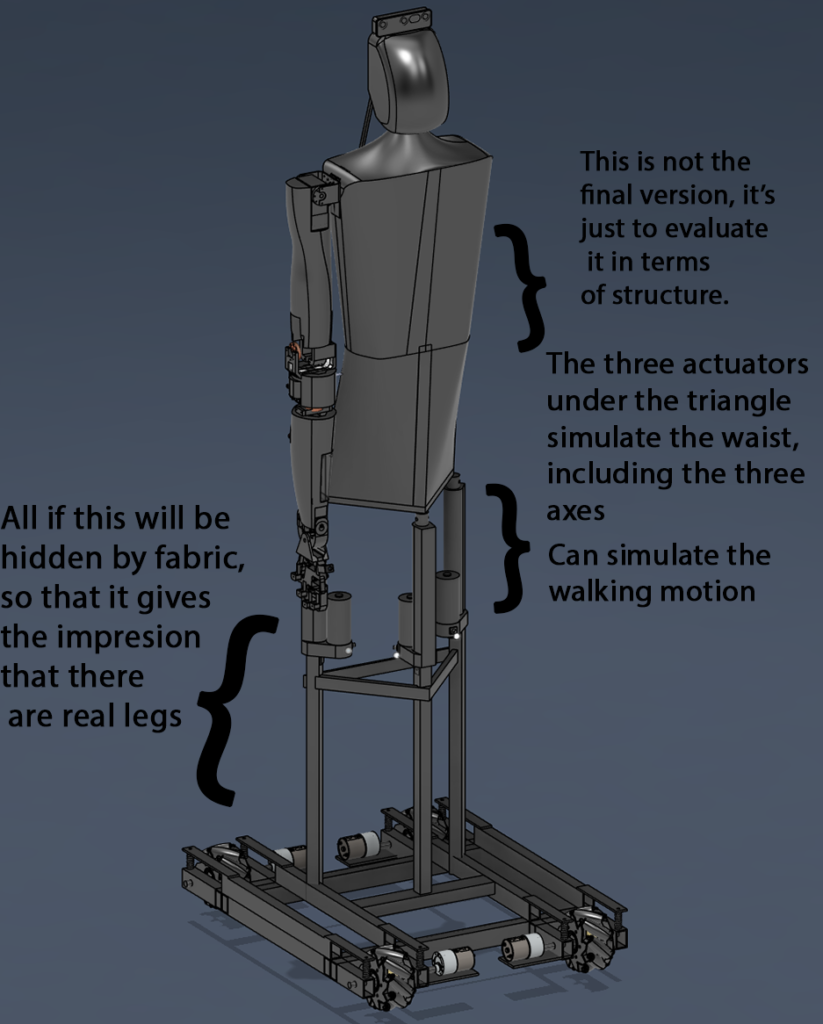
The real challenge of this project is to simulate real human movements and human behavior while imposing the constraint that the robot must move exclusively on wheels.
The robot has all the movements that a human body can have: the body, the arm, the hand, and the fingers can also move from left to right and can bend the fingers, etc.